mechanical Challenge
Tools & Techart Topics
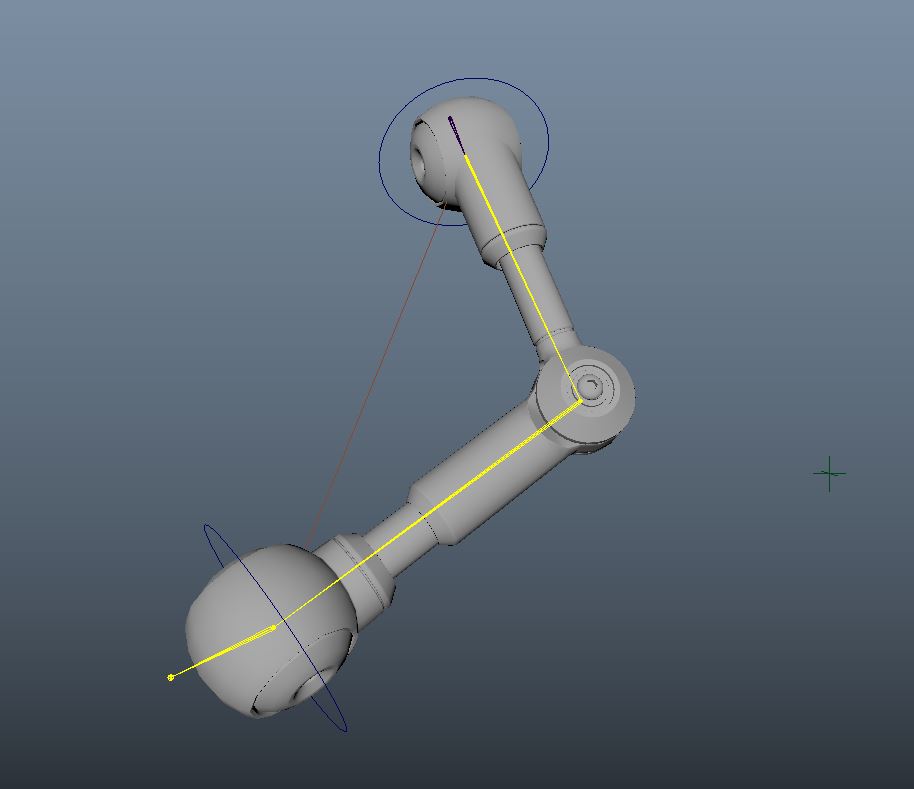
これは "Ask a rigger "というDiscordに投稿された課題で、一見すると非常に簡単なikのセットアップに見えますが、ピストンの狙いが中心から少しずれているため、すぐに難しくなってしまいます。 (モデルはDelcio Gomesによるものです。)
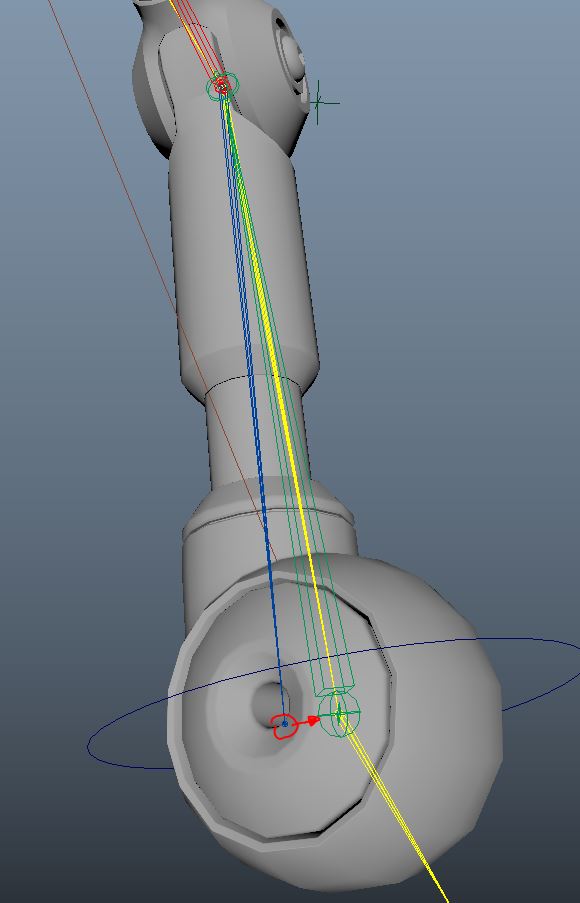
これらのセットアップの主な課題は、IKで動作させることです。FKであれば、それぞれの回転を異なる方法で露出させ、別々に制御することができます。そこで私は、レイヤーシステムを採用しました。私はまず、エンドポイントの中心をボールジョイントのように使い、ヒンジの中心を最初の駆動レイヤーとしてIKセットアップを作成しました。
次の課題は、ピストンの挿入ポイントがボールジョイントからオフセットされているので、正しい方向に向くようにピストンを管理することです。
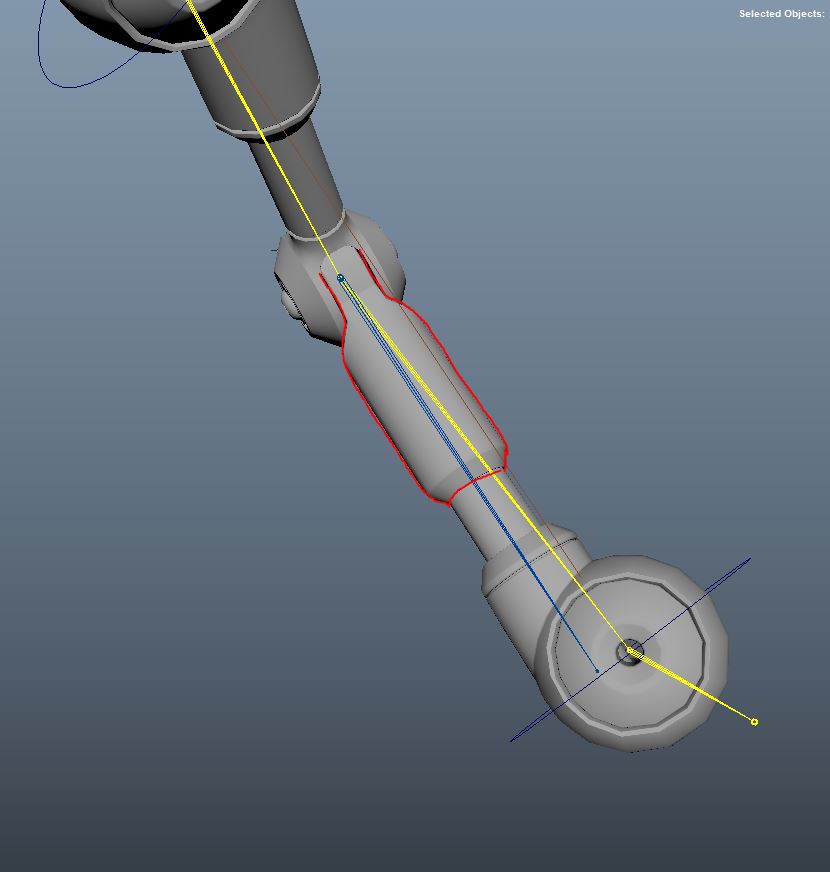
このセットアップは肩のエレメントに取り付けられておらず、2つの手首のジョイントと見なせるので、まず下の部分からセットアップを考え、そこから上に向かって作業を進めていきました。この方法は逆にもできます。 このケースでは、コントロールが手首から肘までのチェーンを駆動し、Ikが取り付けられていますが、これは手首のロールボーンをセットアップするのと同様です。
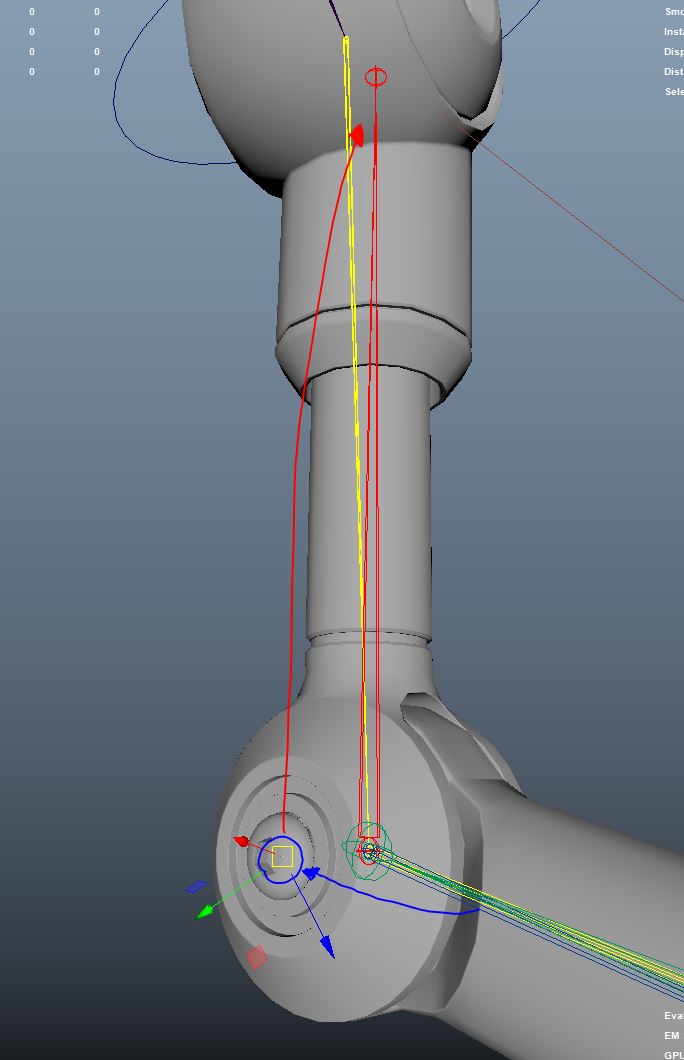
そうすれば、下側のピストンの照準IKをロールボーンに取り付けて、常にソケットジョイントに正しく照準させることができます。
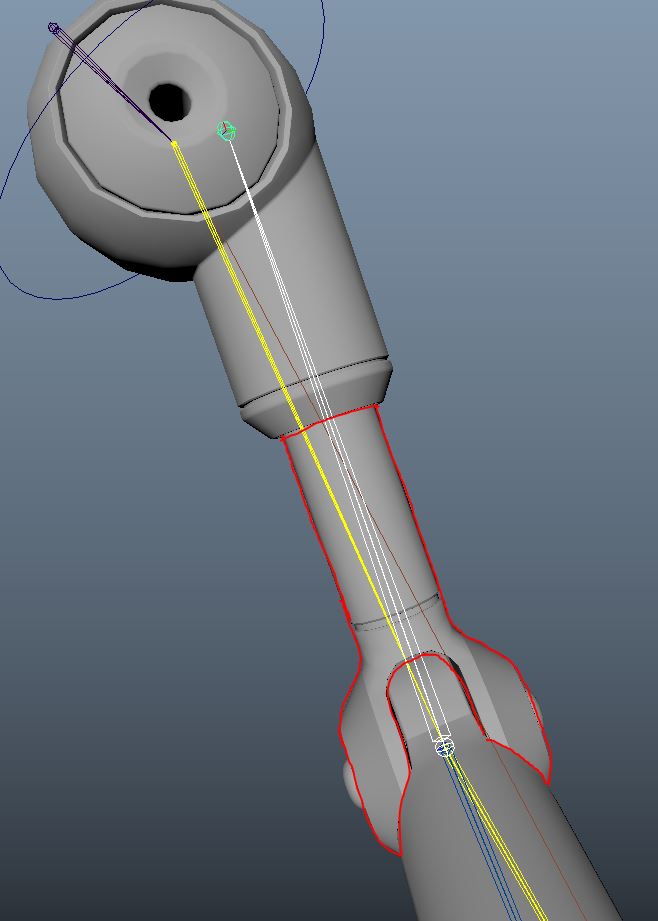
ロールボーンは肘の部分にちょっとした動きを加えるので、これを連鎖的に動かしていく必要があります。手首がねじれている場合、肩のソケットを目指しながら、このねじれに合わせて肩を動かすことになります。上腕のピストンのポールベクターロケーターは、肘のボルトの中心に位置し、下側のピストンジョイントの親となり、上側のピストンを駆動します。
このようにして、アームのロールセットアップがピストンを駆動し、適切な外観の接続を行うという、非常に安定したセットアップが実現しました。
その後は、ボルトがメッシュから出ないように、ボールジョイントがセットされているバケットに接続を追加するだけです。
メッシュをご覧になりたい方は、こちらからダウンロードしてください。